Input options
There are several ways to provide input to the controller.
MSP Protocol
The best option that provides the most functionality is to use the MSP protocol.
iNav provides the most functionality
ArduPilot provides almost as much (there are a few advanced messages not provided)
BetaFlight will also work, but is missing some of the airplane specific messages
Use the following wiring diagram to hook up to a flight controller
Use cli 'input m' to set MSP protocol (default)
Mavlink
Mavlink on ArudPilot provides almost as much functionality as MSP.
Mavlink on iNav is much more limited
Use cli 'input v' to set Mavlink protocol

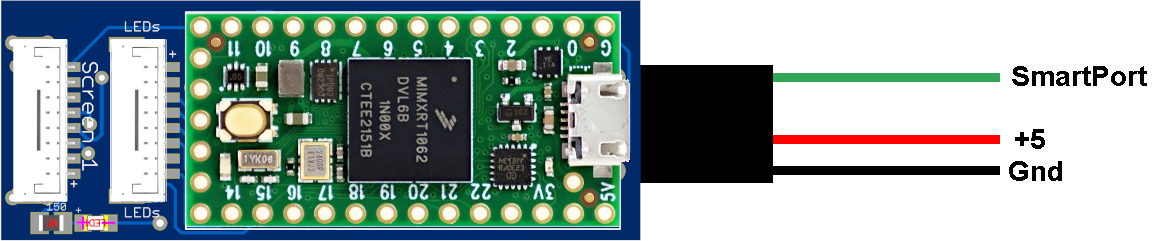
SmartPort (S.Port) Protocol
If you don't have a flight controller, but have SmartPort sensors, the controller can use whatever data is available.
You must have receiver that is able to reading the sensors.
You will need to tap into the S.Port line and feed it into the controller.
The S.Port update is much slower than MSP, but will provide much of the same functionality as the MSP (with the correct sensors)
Use cli 'input p' to set S.Port. Use cli 'input i' for inverted S.Port
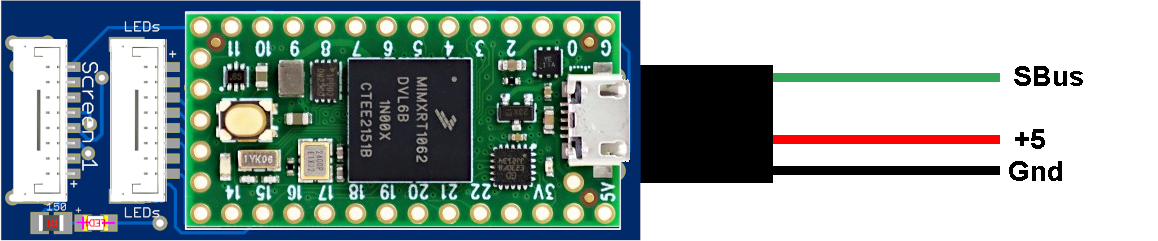
sBus Protocol
The controller can also use the sBus protocol.
It will use the 4 primary channels and feed that into the internal simulator.
The simulator will do it's best to estimate what should be displayed on the screens.
Use cli 'input s' to set to sBus Protocol
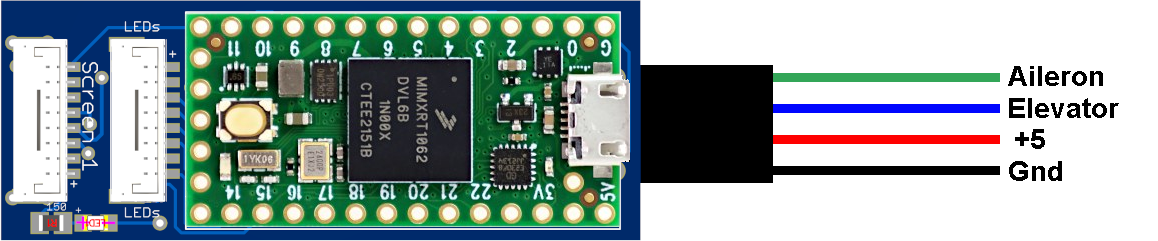
RC channels
The controller can also take input from 2 RC channels, the aileron and elevator.
It will also use the simulator and simulate the throttle at half and the rudder centered.
Use cli 'input r' to set to RC channel input.
If you use RC channels, make sure they are 3.3V and not 5V.